
ARC '24 Missions

Story
In the not-so-distant future, Earth launched a groundbreaking mission to Mars. Initially designed for exploration, the rover’s capabilities were expanded to include the daring task of both investigating the Martian surface and returning with collected samples. With its advanced instruments, the rover meticulously explored the Red Planet, revealing intriguing geological features and gathering samples that held the potential key to Mars' history. Modified for the return journey, the rover navigated the Martian terrain with precision transferring the precious samples to a spacecraft bound for Earth. As the spacecraft entered Earth's atmosphere, scientists anxiously awaited the safe return of the Martian samples, marking a historic milestone in human exploration and deepening our understanding of the mysteries concealed within the rust-hued landscapes of Mars.
Under the Martian night, the rover received a vital mission: prepare a rocket loaded with Martian samples for its journey to Earth. Guided by commands from a team of astronauts, the rover activated launch pad floodlights for an inspection. The rover scans the rocket's surface for defects, ensuring all systems were optimal. The rover takes photos for a final check, examining the hull, solar panels, and antennae. The rover then proceeded to inspect rocket onboard computer and returned to base. In the control center, the rover team relayed the success of the mission. The rocket, now ready for departure, carried the promise of unlocking Martian mysteries in the sample container as it ventured back to Earth.
Mission 1 : Science Sampler
Time Limit: 30 min + 15 min + 10 min
Mission Field: Mars Field
Mission Steps:
This mission is consisted of 3 main parts:
Part 1 | Landing & Exploration (30 min)
-
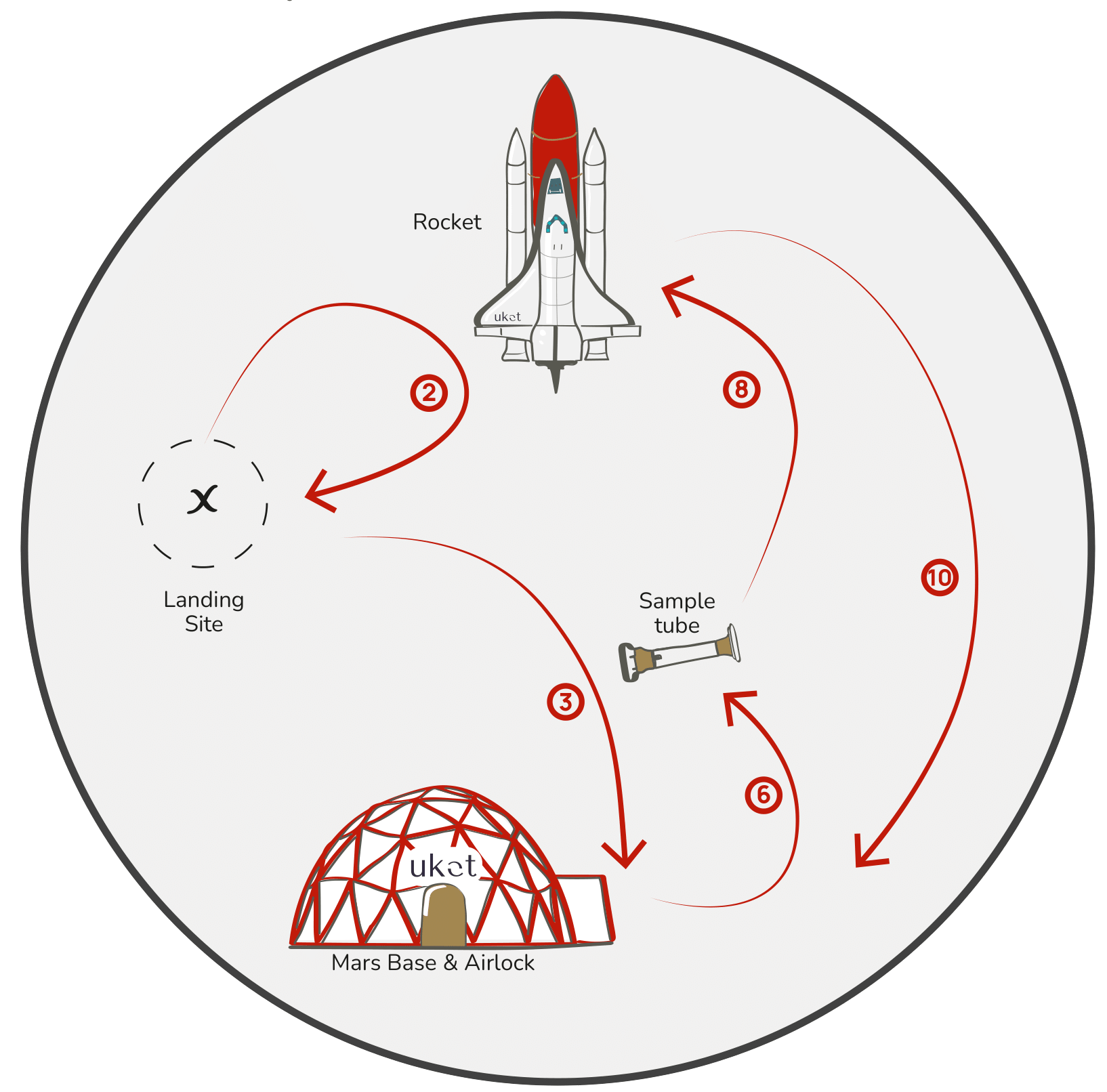
The mission starts from the designated area.
-
The area is surveyed, and the soil samples are collected.
During the sample collection process,-
panoramic photographs of the area
-
photographs of the sampling site
-
any onboard measurements should be taken.
-
-
The rover navigates to the Mars Base
-
After reaching the Mars Base, the rover enters the base through the airlock.
-
The taken sample in its sealed container is handed over to the judges.
-
The rover navigates to the previously dropped sample tube
-
The rover collects the previously dropped sample tube from the ground.
-
The rover carries the sample tube to the rocket.
-
The sample tube is inserted into the rocket.
-
The rover navigates back to the Mars Base.
Part 2 | Laboratory (15 min)
-
Astronaut scientists conduct their experiments.
Part 3 | Presentation (10 min)
-
Selection of the starting point of the rover in this mission is explained.
-
Photos taken during the mission are shown.
-
The sampling location is indicated, and the photographs taken while sampling are shown.
-
The results of the sample examinations are explained.
-
Stratigraphy of the region should be presented.
-
The results based on any measurements (such as sensors) should be explaine
-
Bonuses, if gathered during the mission, should be presented.

Mission 4 : Night Launch
Time Limit: 15 min
Mission Field: Mars Field
Mission Time: After Sunset

Mission Steps:
-
The mission begins with the rover leaving the airlock.
-
The rover moves towards the fuel cell.
-
The rover switches the fuel cell on.
-
The rover takes first photo of the rocket from the perspective of light source 1.
-
The rover takes second photo of the rocket from the perspective of light source 2.
-
The rover moves towards the rocket.
-
The rover should take a photo of the Launch Readiness Inspection screen showing the launch time.
-
The rover circles around the rocket and takes a close-up photo of the rocket's connection landing legs.
-
Rover returns to the airlock.

Story
A team of astronauts from various space agencies have landed on a promising lunar area rich in water ice and aluminum compounds. They are conducting a 15-day mission on the sunlit side, setting up a temporary dome-shaped 6-meter lunar base. The mission involves studying long-term effects, experimenting with in-situ resource extraction, and learning to extract resources from moon regolith. Autonomous robots survey the lunar surface for useful ores and explore lava tubes. When a promising mining location is identified, a remotely controlled robot deploys a self-drilling ore mining cart. After collecting resources, a rover transports them to the base for analysis and extraction in a specialized oven instrument. The mission's success hinges on extracting the intended resources to a specified amount, with the goal of establishing a permanent lunar base next year. This base will utilize moon resources for infrastructure and energy, evolving into a colony in subsequent years.
Mission 2 : Autonomous Exploration
Time Limit: 30 min
Mission Field: Moon Field

Mission Steps:
-
The activity light on the rover turns yellow for autonomous driving.
-
The rover is outfitted with a tool and is required to carry it until the end of this stage.
-
The mission starts in the airlock of the Moon Base and the rover moves out of the airlock.
-
The rover navigates to the drop area given by the coordinates.
-
Rover comes to a full stop and drops the tool in the circle.
-
The rover navigates to the lava tube entrance given by the coordinates, and passes through the entrance.
-
The rover measures a physical quantity while navigating the lava tube.
-
The rover exits the lava tube and reports back with measurements results.
-
The rover navigates to the airlock, avoiding any obstacles along the way.
-
The rover enters the airlock.
Mission 3 : Lunar Robotic Prospector
Time Limit: 30 min
Mission Field: Moon Field

Mission Steps:
-
The mission starts in the airlock of the Moon Base.
-
The rover goes to the Mining Cart (MC).
-
The rover transports the Mining Cart (MC) to the designated drilling area.
-
Upon arrival at the drilling site, the rover manipulates the mechanisms on the MC to start the mining process.
-
Rover pulls 3 solar panel release pins.
-
Rover adjusts the slider to select drill mode.
-
Rover pulls the lever to start the power for drilling.
-
-
The rover waits for the drilling process until the container is full. While waiting the rover can turn the hand-wheel for a certain amount to accelerate the drilling process.
-
The rover opens a lid to take the container out.
-
The rover carries the container to the Resource Extractor (RE) near the base.
-
The rover puts the container inside of the RE properly.
-
The rover then returns to the airlock.
Side Missions
Challenge to Shine
Time limit: 10 minutes with each judge
This side challenge is a presentation challenge of ideal rover design of the team to experts in their fields. The presentations made in this challenge are evaluated separately and not be included in the general challenge score. The fields of the experts are science, autonomous driving and control, robotic arm, driving in difficult terrain, and team structure, etc. (see ARC Manual v.3.). Team members will have 10 minutes to present their approach to the stated fields during this challenging process to the judges in different rooms. The presentations will be evaluated, and the judges will choose the winner of each field. Prizes will be given to the winning teams. Each field can only have one winner.
Side-Challenges
During challenge days, there will be side-challenges that are not a part of the main challenge. These challenges are a set of games and mostly require rover-teammate and multi-rover interaction. All of the winners will get special awards. The ARC Committee has all rights to make changes to side-challenges until the competition day. Some of the planned side missions will be stated in this section, by Manual v.3.